AMIGA Operations Toolkit
Live · four-tool suite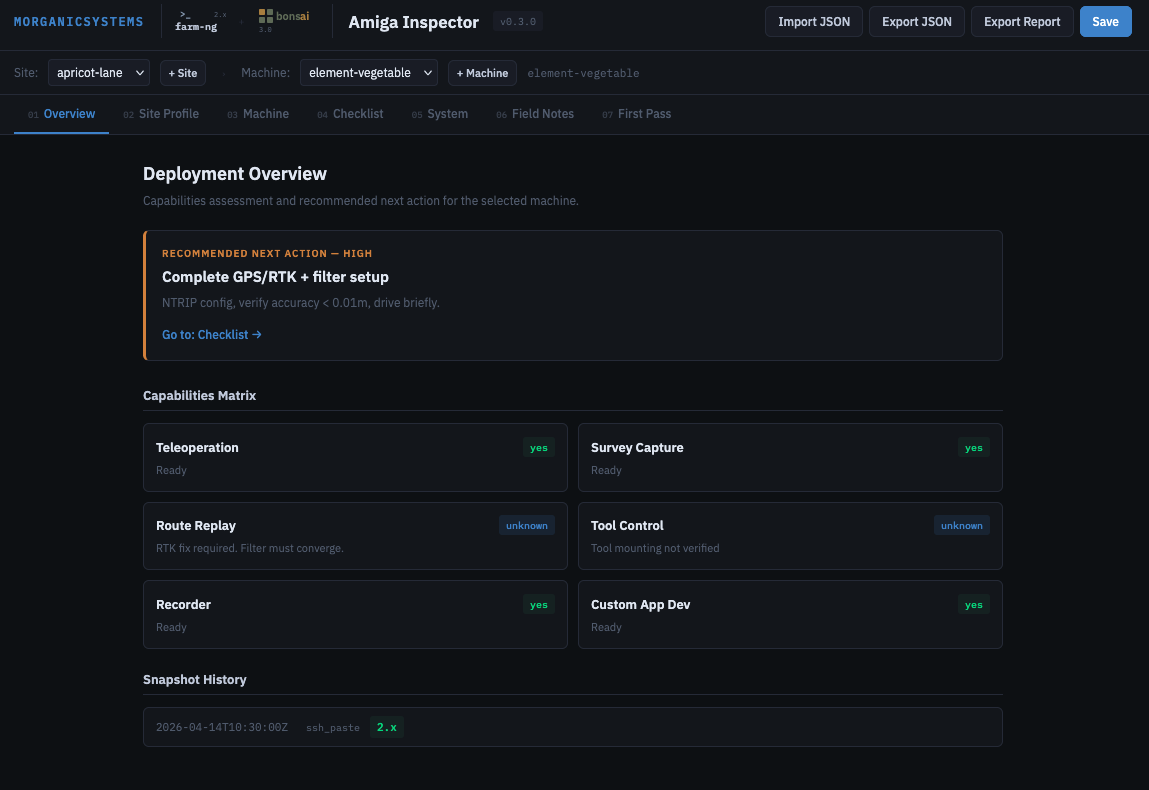
Agricultural robotics field deployments produce a steady flow of operational information that has nowhere structured to live. Machine state changes between visits. Site geometry — bed layouts, irrigation lines, headlands, access constraints — exists in operator memory or scattered notes. Pass planning happens on whiteboards or not at all. Visit-to-visit continuity depends on whoever was there last remembering what they did.
The result, across small-fleet field deployments, is that a real fraction of each visit gets spent reconstructing context that should already be known. Operational discipline that's standard in enterprise infrastructure — documentation, change control, sustained accountability — has no comparable layer in field robotics.
AMIGA Operations Toolkit is a four-tool suite of browser-based field tools for working with the Bonsai Amiga autonomous tractor platform. It runs offline, has no server dependency, and is operated through MorganicSystems.
The four tools share a unified workspace and a common site-and-machine context model:
- Inspector — machine readiness, configuration state, baseline comparison
- Bed Planner — site geometry, bed and pass-row layout, spatial reference
- Pass Planner — operation sequencing, pass organization, next-visit planning
- Visit Log — what happened, what changed, structured field notes
The toolkit supports a practical field workflow loop: prepare for the visit, inspect machine state, capture geometry, plan operations, document outcomes, and share a clear summary with the farm or trial team. Each tool addresses one stage of that loop, and they share context so that information captured in one tool — site, machine, operating session — is available to the others without re-entry.

Before: field robotics deployments without a structured software layer for readiness, planning, and operational record-keeping. After: a four-tool field toolkit covering machine state, field geometry, pass organization, and visit continuity.
The toolkit is offline-first and browser-based: no backend service, no account requirement, no network dependency at the edge. State is stored locally and encrypted; cross-tool context propagation is handled in shared workspace files that an operator can save, transfer, and version.
Generation-aware support covers both V2.x (farm-ng) and V3.0 (Bonsai) Amiga platforms, with normalization handled in the data layer so that operators working across both generations see consistent tool behavior.
AMIGA is an independent MorganicSystems field toolkit. It is not an official Bonsai or farm-ng product and does not imply endorsement by either.